This article is not about AI and it is not written with AI, but the work that I’m about to present was definitely motivated by AI. And because I generally like telling stories, I have to give you that background. Do with that whatever you want, but… it’d be a pity if you left just because the AI word showed up in the first paragraph! I think the technical explanation that follows is at the very least entertaining and also interesting independently of AI.
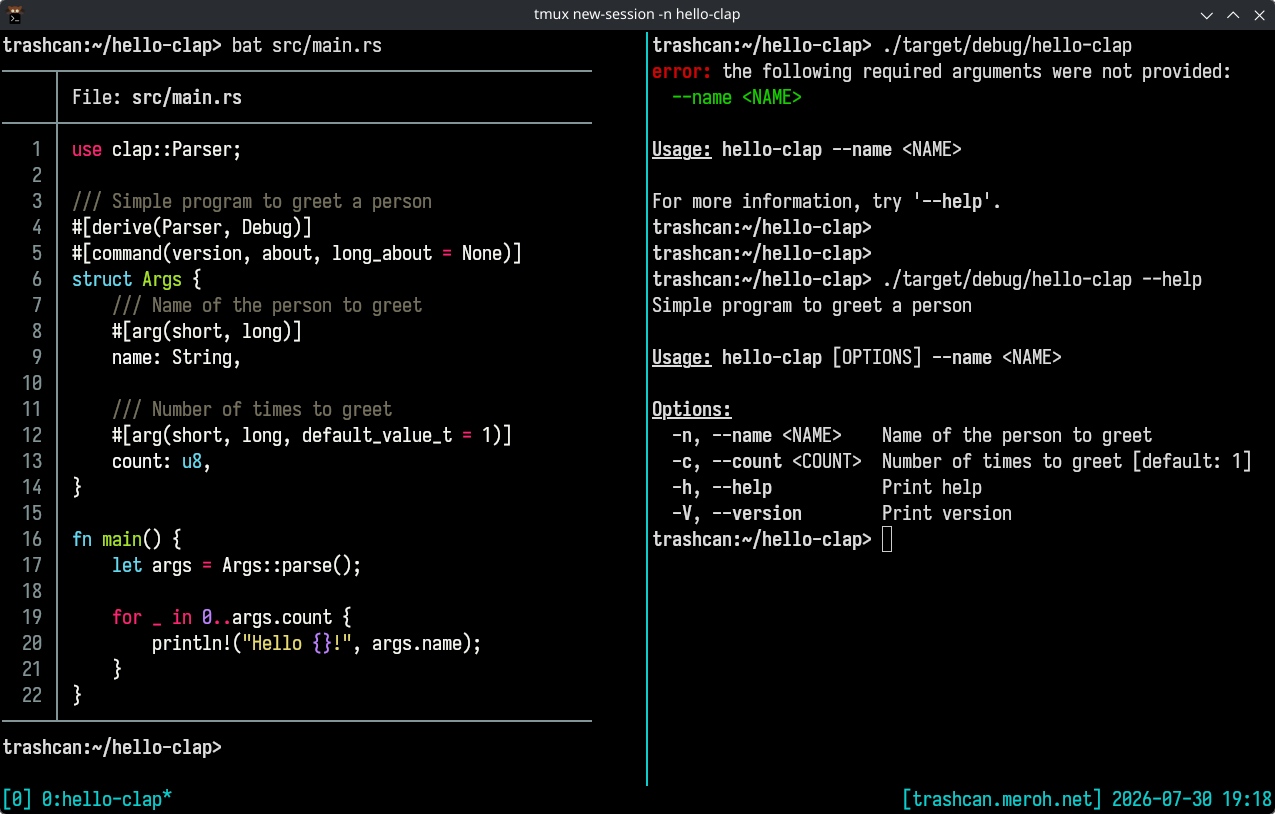
Back in December, I started toying with coding agents. One thing I tried, and for which I didn’t expect a lot of success, was to point an AI agent to the EndBASIC public documentation and ask it to write games like Space Invaders or Mario from scratch. And even though the results weren’t perfect and they didn’t work on the first try, they did work with a few tiny tweaks. Combining that with a bunch of hand-written AGENTS.md rules, I had an agent producing EndBASIC demos with ease.
This experiment was impressive because I did not expect an agent to be able to write EndBASIC code… and because it worked, it fueled my interest to pick EndBASIC’s own development back up. Three thoughts came to mind:
- Increase EndBASIC’s “self-documenting” aspects so that an AI agent can learn about its idiosyncrasies unsupervised.
- Speed up EndBASIC so that it can run more elaborate games.
- Extend EndBASIC with long-desired primitives like sprites and sound, to finally realize the vision behind the project.
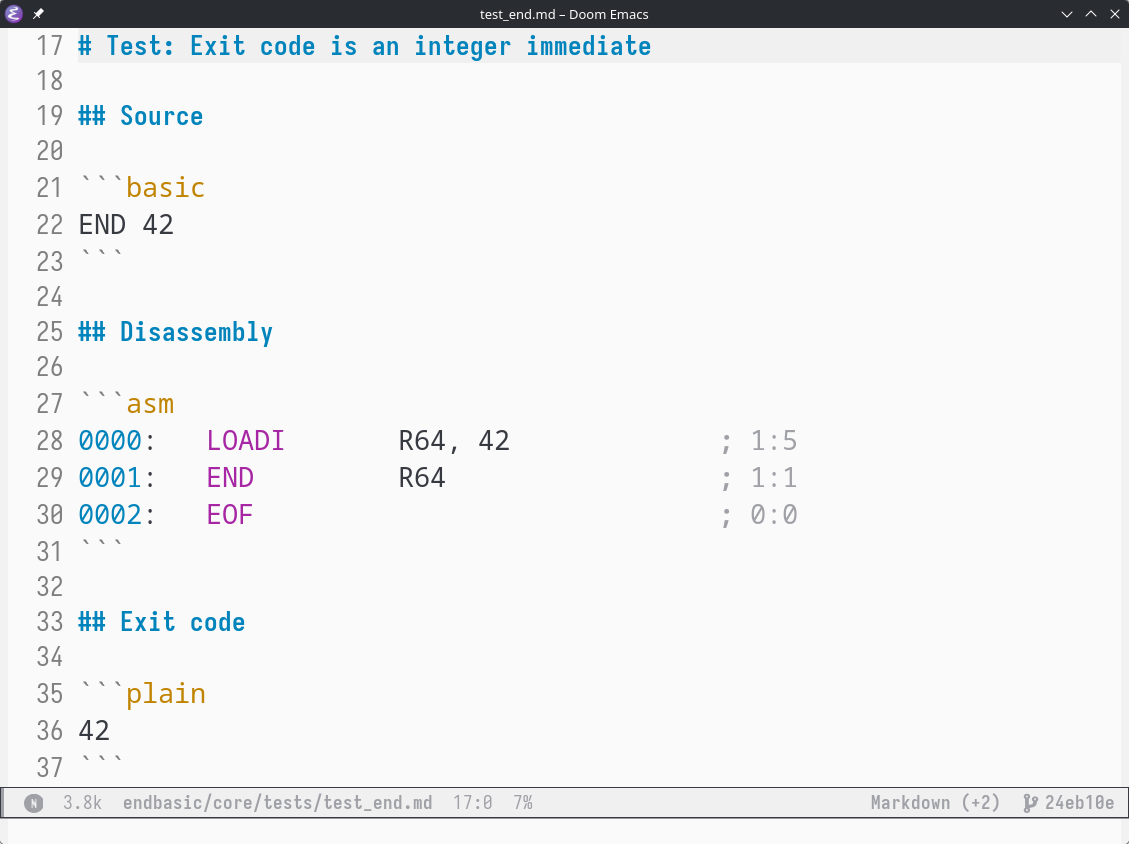
These thoughts combined sparked the rewrite of EndBASIC’s core that I’ve been pursuing since January and which should see the light of day in the upcoming release. But before that happens, I want to talk to you about just one of the cool pieces behind the new core: namely, its approach to testing. I’ve stopped writing unit tests for the compiler and VM in Rust and I’ve switched to writing them in Markdown. And I believe this has turned out to be a pretty nice approach.