
In “From 0 to 1 MB in DOS”, I presented an overview of all the ways in which DOS and its applications tried to maximize the use of the 1 MB address space inherited from the 8086—even after the 80286 introduced support for 16 MB of memory and the 80386 opened the gates to 4 GB.
I know I promised that this follow-up article would be about DJGPP, but before getting into that review, I realized I had to take another detour to cover three more topics. Namely: unreal mode, which I intentionally ignored to not derail the post; LOADALL, which I didn’t know about until you readers mentioned it; and DOS extenders, which I was planning to describe in the DJGPP article but they are a better fit for this one.
So… strap your seat belts on and dive right in for another tour through the ancient techniques that DOS had to pull off to peek into the memory address space above the first MB. And get your hands ready because we’ll go over assembly code for a step-by-step jump into unreal mode.
A blog on operating systems, programming languages, testing, build systems, my own software projects and even personal productivity. Specifics include FreeBSD, Linux, Rust, Bazel and EndBASIC.
![]()
![]()
![]()
What is unreal mode anyway?
Having read the preceding post, you should know by now what the real, protected, and VM86 modes of the x86 processors are. But there is one extra unofficial mode I did not talk about, and that is the unreal mode. The mode with the coolest name if you ask me.
Unreal mode is a special state of the processor in which the CPU acts as if it was in real mode… but with segment descriptors that allow it to reference memory above the 1 MB limit. These segments are impossible to define in real mode but, with different tricks for the 80286 and 80386, they become a possibility.
To understand how unreal mode works, we need to go back to the diagram I presented earlier describing the address resolution process that the 80286’s MMU executes on every memory access:
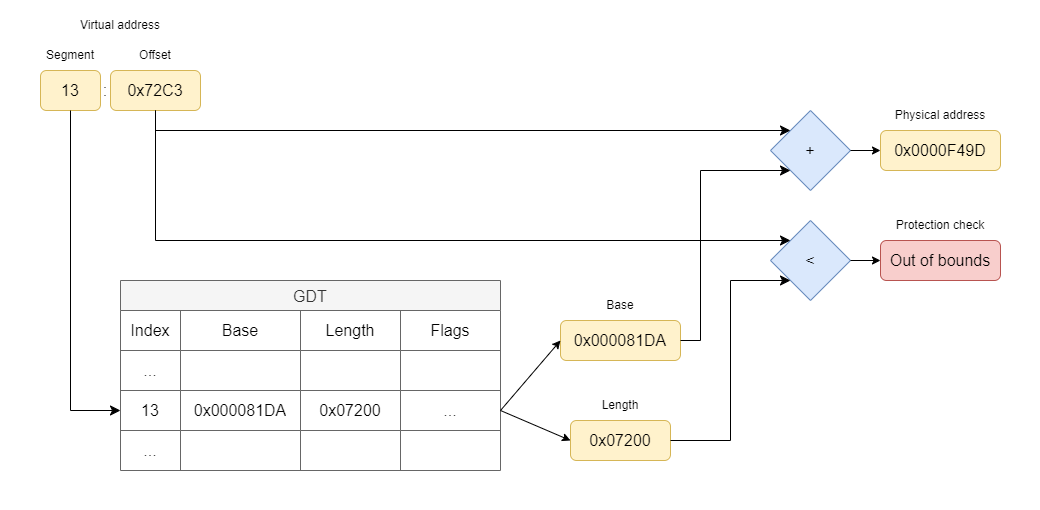
As you can see in the diagram, for every memory access of the form segment:offset, the MMU:
- decodes the segment selector specified by
segmentto determine whether to query the GDT or LDT and which segment descriptor to read, - reads the determined segment descriptor by indexing into the GDT or LDT tables,
- decodes the segments’ base address and limit as stored in the descriptor,
- checks the privileges of the executing code against the protections recorded in the descriptor,
- and ensures the
offsetis within the segment limit defined in the descriptor.
Only after these steps complete successfully, the memory access is allowed; otherwise, the processor raises a General Protection Fault exception.
This is all conceptually good until you realize that the GDT and LDT live in main memory… and main memory is slow—excruciatingly so in processor time. Having to read from main memory to resolve every memory access, even with a good L1 or L2 cache, would have a big performance impact on most applications.
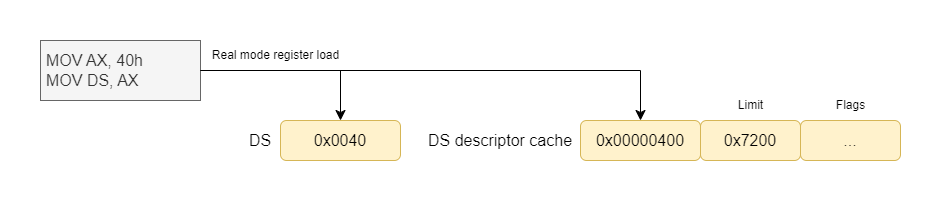
To resolve this inefficiency, the processor has a cache of segment descriptors. Instructions that update the segment registers, such as MOV DS, AX, fetch descriptors from the GDT or LDT tables and store them in the cache. Instructions that reference memory, such as MOV AX, DS:1234h, read the descriptors from the cache without ever reaching out to main memory.
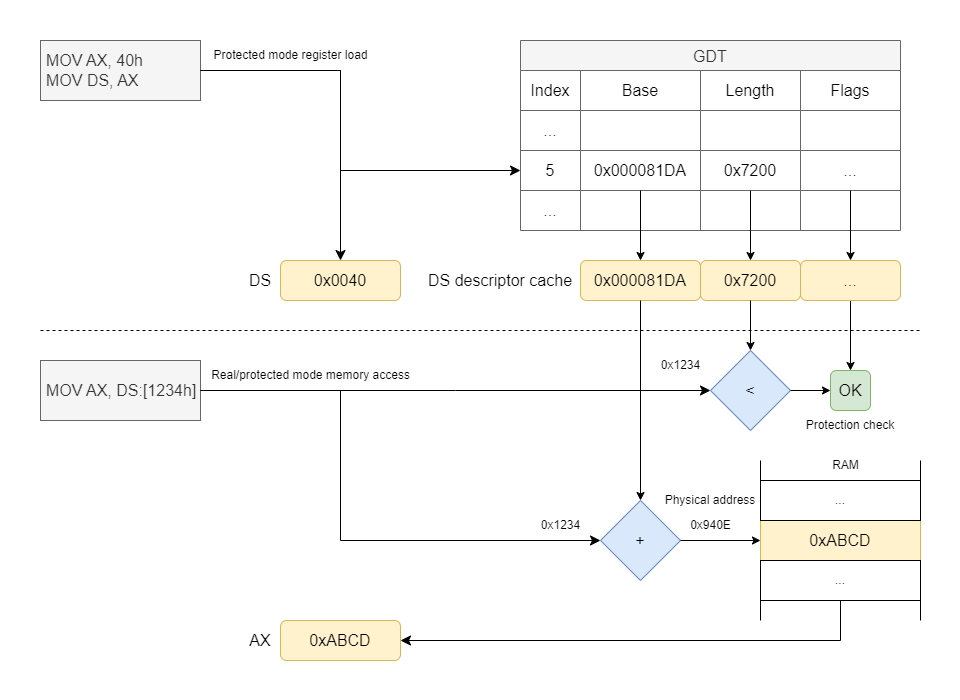
So far so good, but let’s add another twist. The diagram I presented earlier showing how the 80286 resolves a memory address does not only apply to protected mode: it applies to real mode too. In both modes, the processor accesses the descriptor cache to peek at the segment limits and protection settings. This means that, for real mode to work as 8086 code expects, the cache must contain values that are compatible with real mode: in particular, the limits must be set to 64 KB.
But what if we could somehow load arbitrary segment descriptors into the processor’s cache and leverage those in real mode? If we could do that, we could increase the segment limits stored in the cache, and then any memory references that use those cached descriptors would be able to bypass the real mode rules and access extended memory directly.
And this, dear reader, is what unreal mode is about. There is a ton of nuance about how this mode was discovered and how it got its name, and to learn more about that story, I’ll redirect you to OS/2 Museum’s excellent history of the unreal mode. But keep in mind that unreal mode is a clutch that DOS applications used to access memory above the 1 MB mark while avoiding expensive protected mode switches.
Leveraging unreal mode
Before describing how we can switch the processor to unreal mode, we must first look at how we can actually take advantage of this mode.
In the 80286 case, unreal mode is annoying to use: the 80286 is a 16-bit CPU, which means that the offset part of a memory reference is limited to 64 KB. We can configure segments whose base address lies beyond the 1 MB address space, allowing us to read extended memory from real mode, but we can only do so in 64 KB chunks at a time.
The 80386 fares better due to it being a 32-bit CPU: the offset part of a memory reference can be expressed as a 32-bit quantity. We can do both MOV AX, DS:[SI] and MOV AX, DS:[ESI], which means that if DS has a base of zero, we can reference any memory position in the 4 GB address space when using the ESI offset. Crucially, and contrary to what some people think, we can issue these two variants from 16-bit real mode: 32-bit instructions are not restricted to protected mode.
The way the 80386 allows 32-bit instructions in 16-bit mode and vice versa is via two properties. The first is an instruction width setting at the code segment level: segment descriptors can indicate that the code they contain is 16-bit or 32-bit. The default for real mode is to assume that code segments are set to 16 bits, but in protected mode we can choose whatever we prefer. The second is the 0x66 instruction prefix, which tells the processor that the following instruction operates in the opposite mode of what is configured in the current code segment: e.g. if the current code segment is a 16-bit segment, the 0x66 prefix marks 32-bit instructions.
Knowing this, we can see that unreal mode is most useful in the 80386 because, once enabled, code can easily reference any extended memory address using 32-bit offsets and the 0x66 prefix. But the 16-bit constraints of the 80286 don’t make unreal mode less useful given how much the DOS ecosystem needed to escape the real mode address space limitations and how difficult it was to leave protected mode in the 80286.
With that out of the way, what we are missing in our discussion are the ways by which to enter unreal mode. There are at least two: the undocumented LOADALL instruction and an unsupported jump from protected mode to real mode. Let’s take a look at both.
LOADALL
LOADALL is an undocumented instruction of the 80286 and 80386 processors. This instruction has a long history and I’m not going to cover it in detail because others have done a much better job than I could. I’ll restrict my explanation to what the instruction does and why it is useful to enter unreal mode.
Simply put, all LOADALL does is, as its name implies, set all processor registers at once with values that come from a memory region. This is similar to the widely unused built-in task switching functionality of x86 processors, which reloads the processor state with register values stored in a Task State Segment (TSS) descriptor.
But LOADALL has some quirks that the TSS descriptor doesn’t have, and those are what make it interesting. Witness the contents of the memory that LOADALL reads on an 80286:
Physical Address CPU Register
---------------- ------------
0800h-0805h None
0806h-0807h MSW
0808h-0815h None
0816h-0817h TR
0818h-0819h Flag word
081Ah-081Bh IP
081Ch-081Dh LDT
081Eh-081Fh DS
0820h-0821h SS
0822h-0823h CS
0824h-0825h ES
0826h-0827h DI
0828h-0829h SI
082Ah-082Bh BP
082Ch-082Dh SP
082Eh-082Fh BX
0830h-0831h DX
0832h-0833h CX
0834h-0835h AX
0836h-083Bh ES descriptor cache
083Ch-0841h CS descriptor cache
0842h-0847h SS descriptor cache
0848h-084Dh DS descriptor cache
084Eh-0853h GDTR
0854h-0859h LDT descriptor cache
085Ah-085Fh IDTR
0860h-0865h TSS descriptor cache
Registers, registers, more registers, descriptor cache… Wait, what? Entries for the cached segment descriptors? That’s interesting. These are the actual values for the segment descriptors that the processor stores in its internal cache. Which means that, by issuing a carefully-crafted LOADALL, we can tell the processor to set the cached descriptors to values that are nonsensical for the current operation mode—and the processor does not complain.
In essence, with just one instruction, we can tell the processor that the cached descriptors have base addresses above the 1 MB limit and/or that they have limits larger than 64 KB. And the processor will just accept those into the cache and use them for future memory references.
As it turns out, HIMEM.SYS did leverage LOADALL and we can even find its original source code to peek into how it achieved this feat. It’s not trivial to do, but the performance gains of such an undocumented instruction were too hard to pass on in order to implement efficient transfers between conventional and extended memory.
This made me curious so I tried replicating LOADALL’s usage in DOSBox and… failed because DOSBox does not implement this instruction—which is understandable because it was not documented, it was very specific to two processors, and it apparently was not widely used outside of HIMEM.SYS. Maybe more-accurate processor emulators supply it, but I didn’t bother trying.
Which brings us to the other way to enter unreal mode: an unsupported jump from protected mode to real mode in the 80386.
Real to protected mode and back
Protected mode fascinated me as a child when I read about it in books that didn’t “belong” to my age. After having dipped my toes in 8086 assembly and having toyed around with boot sectors and the like, I fantasized about how protected mode “unlocked” enormous power. I knew I had to learn such black arts to write my own operating system and I remember writing code that tried to enter protected mode and always failed—yet it sounded so easy from the books: just set bit 0 of CR0 to 1!
It wasn’t until many years later, around 2007, that I decided I wanted to fulfill my long-term dream to write an operating system. At that point, I invested some time to get protected mode to work—and I finally did, with interrupts enabled and all. (Spoiler alert: I never got to write an OS though… yet?) But even if that worked, getting into protected mode is always a frustrating experience of having to get many teeny tiny details right just so that the machine doesn’t crash. You do it right and you see absolutely nothing; you do it wrong and you see absolutely nothing either.
But wait. Why am I telling you all this? Ah yes, because another way of entering unreal mode is the following dance:
- Switch to protected mode.
- Set up segment registers to segment descriptors that provide access to the full address space, causing the cached descriptors to have a 4 GB limit.
- Switch back to real mode with the previous unsupported segment configuration in place.
Upon switching back to real mode, the properties of the segment descriptors that don’t make sense in real mode (those limits higher than 64 KB) are sticky, meaning that no architectural operations such as MOV DS, AX touch those bits of the cache. With that, it becomes possible to address extended memory.
Unfortunately, the 80286 did not have a mechanism to switch from protected mode back to real mode. Creative folks found ways to do this by triple-faulting the CPU and carefully setting registers to skip the BIOS POST code, but this process was extremely slow and thus unfeasible for frequent switches. At the time, the lack of this feature in the 80286 was a major complaint from OS vendors because it made it difficult to support running DOS programs from within a modern operating system.
Intel addressed those concerns with the launch of the 80386 and its new VM86 mode. But… that wasn’t the only change. The 80386 also added the ability to return to real mode from protected mode—with a lot of caveats. Intel was prescriptive in how exactly to return to real mode and never described what would happen if you didn’t follow the rules to the letter… which was essentially begging for someone to try and see what would happen when doing that.
The answer, as we saw above, is unreal mode.
Hands-on unreal mode
All of the above research made me really curious so I got the urge to see unreal mode in action. So, in preparation for this article, I wrote a trivial DOS program that enters unreal mode and shows it working.
As in the past, getting this demo to a functional state was a frustrating experience of fighting with carefully-crafted register values and memory offsets, DOSBox crashes, and Bochs oddities. But in the end my demo ran successfully, and because I couldn’t find any trivial, readily-available sample piece of code online that did this, I concluded that I had to present it to you here for posterity’s sake.
So. Let’s get our hands dirty. All you need is Doom Emacs a text editor, NASM, and DOSBox. Our goal is to:
- write a flat COM executable,
- without sections (code and data mixed),
- all in 16-bit code with the occasional 32-bit operation override,
- that enters protected mode,
- that stores a string somewhere in extended memory far from the reach of real mode,
- that drops back to (un)real mode,
- that copies the string we stored in extended memory to conventional memory,
- that tells DOS to print the string we fetched,
- and that finally returns to DOS to prove that DOS still works.
Let’s begin.
The first thing we have to do is set up the GDT. We’ll use statically-configured descriptors in the code, like these:
;;; Null descriptor.
dq 0
;;; Code descriptor for this binary. The base address needs fixup at
;;; runtime to point to the location where the code was loaded.
CODE_DESC equ 1 << 3
dw 0ffffh ; Low 16 bits of the limit.
code_base_low dw 0 ; Low 16 bits of the base address.
code_base_mid db 0 ; Middle 8 bits of the base address.
db 10011110b ; Code/data, exec, conforming, read allowed.
db 00000000b ; Not 4KB, 16-bit, no long mode, limit 00h.
code_base_high db 0 ; High 8 bits of the base address.
;;; Data/stack descriptor for this binary. The base address needs fixup
;;; at runtime to point to the location where the code was loaded.
DATA_DESC equ 2 << 3
dw 0ffffh ; Low 16 bits of the limit.
data_base_low dw 0 ; Low 16 bits of the base address.
data_base_mid db 0 ; Middle 8 bits of the base address.
db 10010010b ; Code/data, data, grows up, read-write.
db 00000000b ; Not 4KB, 16-bit, no long mode, limit 00h.
data_base_high db 0 ; High 8 bits of the base address.
;;; Linear data descriptor covering the full 4 GB address space. No fixup
;;; necessary.
LINEAR_DESC equ 3 << 3
dw 0ffffh ; Low 16 bits of the limit.
dw 0 ; Low 8 bits of the base address.
db 0 ; Middle 8 bits of the base address.
db 10010010b ; Code/data, data, grows up, read-write.
db 11001111b ; 4KB, 16-bit, no long mode, limit=0fh.
db 0 ; High 8 bits of the base address.
The GDT presented above defines four descriptors:
- The null descriptor, which is unused but must be present.
- The code descriptor (
CODE_DESC) for our COM executable. This is configured to 16 bits so that we don’t have to mix 16-bit and 32-bit sections in the same source file (which is easy but I wanted to avoid). Note also that the base address is zero, but we’ll have to patch it up at runtime to point to the actual location where DOS loaded our executable. We cannot predict this and all the offsets built into the code must remain valid when in protected mode, so we must compute this dynamically. - The data and stack descriptor (
DATA_DESC) for our COM executable. For the same reasons as the code descriptor, we must compute its base address at runtime. - A linear data descriptor (
LINEAR_DESC) to be able to reference the whole 4 GB address space. We’ll use this one to set up the segments for unreal mode.
Next up, we need to define the descriptor for the GDT itself right after the GDT data section:
gdt_desc equ $-gdt
gdt_base dd 0
Easy, but again, note how gdt_base is zero. The address to the GDT needs to be a linear address, and because we don’t know where the COM file will be loaded, we have to compute this address at runtime.
After this, it’s time to start the code section. The first thing we do is fix up all of the base addresses we left blank in the GDT itself and the GDT descriptor. Note that, because we target a COM binary (or a boot sector if you are so inclined), we can assume that CS, DS, ES, and SS all point to the same place, which makes things significantly easier:
;; Assume CS = DS = ES = SS (COM file or boot sector).
mov [real_cs], cs
;; Populate the GDT code and data descriptors with our actual base address
;; so that the built-in code offsets work once we enter protected mode.
xor eax, eax
mov ax, cs
shl eax, 4
mov [code_base_low], ax
mov [data_base_low], ax
shr eax, 16
mov [code_base_mid], al
mov [data_base_mid], al
mov [code_base_high], ah
mov [data_base_mid], al
;; Populate the GDT descriptor with the linear address of the GDT.
xor eax, eax
mov eax, ds
shl eax, 4
add eax, gdt
mov [gdt_base], eax
Then, we do preparatory work to enter protected mode: namely, we disable the Non-Maskable Interrupt (NMI) and interrupts in general, and we enable the A20 gate:
;; Disable the Non-Maskable Interrupt (NMI) and interrupts.
in al, 70h
or al, 80h
out 70h, al
in al, 71h
cli
;; Enable the A20 gate.
in al, 92h
or al, 2
out 92h, al
And then, we can finally do the magic to enter protected mode by loading the GDT descriptor, updating the PE (0th) bit in the CR0 register, and doing a long jump:
;; Load the GDT.
lgdt [gdt_desc]
;; Enable protected mode.
mov eax, cr0
or eax, 1
mov cr0, eax
;; Flush out the processor pipeline and reload CS.
jmp CODE_DESC:protected_mode
That’s it. We have reached the protected mode realm! How exciting is that? We are now in a 16-bit code segment but the machine state is mostly “unusable”. None of the segment registers except CS are valid and interrupts are disabled (because we didn’t bother to set up the IDT—and we don’t have to for this simple experiment). So let’s do the minimum set up that we need:
protected_mode:
;; Set up the data and stack segments.
mov ax, DATA_DESC
mov ds, ax
mov ss, ax
Now that the basic segments are configured, let’s copy the msg string built into the binary into extended memory. We do this by pointing ES to our linear segment and using the EXTENDED_ADDR offset, which I set to an arbitrary 4 MB:
;; Store a message in extended memory. We are in protected mode so this
;; works by design.
mov ax, LINEAR_DESC ; Load the linear address space in ES.
mov es, ax
mov esi, msg ; Point DS:[ESI] to our message.
mov edi, EXTENDED_ADDR ; Point ES:[EDI] to extended memory.
mov ecx, MSGLEN
o32 rep movsb ; Must use 32-bit addressing.
Once this is done, we prepare the FS segment with a large limit so that we can use it from unreal mode and restore ES to the conventional values:
;; Set up FS as an "unreal mode" segment.
mov ax, LINEAR_DESC
mov fs, ax
;; ... but restore ES to have standard real mode limits. Not strictly
;; necessary but helps to prove our example.
mov ax, DATA_DESC
mov es, ax
And, with that, we are ready to pivot back to real mode…
;; Disable protected mode.
mov eax, cr0
and eax, ~1
mov cr0, eax
;; And now return to real mode with a far jump.
pushf
push word [real_cs]
push unreal_mode
iret
… except that it isn’t “valid” real mode! Remember that we left FS configured with a high, non-standard limit of 4 GB? Such non-standard limit remains in the segment cache. But before leveraging that, let’s make our new machine state functional to continue executing the COM binary:
unreal_mode:
;; Reload real mode COM segment layout.
mov bx, cs
mov ds, bx
mov es, bx
mov ss, bx
We can now also reenable interrupts, which we must do before we decide to return to DOS:
;; Reenable the NMI and interrupts.
sti
in al, 70h
and al, 7fh
out 70h, al
in al, 71h
But, crucially, we keep the A20 enabled in order to correctly reference extended memory later on!
And after all of this dance, that’s really it. We are in unreal mode. Any memory references we make through the FS segment register can use offsets beyond the 1 MB limit no matter what its segment base is and no matter if the segment base changes.
Easy to say, hard to believe. Let’s prove that this is true. Let’s first fetch the message we stored in extended memory by copying it to conventional memory:
;; Fetch the message from extended memory by using a large offset. This
;; would not work in real mode or VM86 (even with 32-bit addressing), but
;; does because we are actually in unreal mode.
xor ax, ax ; Clear FS to show its high limits remain.
mov fs, ax
mov esi, EXTENDED_ADDR ; Point FS:[ESI] to extended memory.
mov edi, msgcopy ; Point ES:[EDI] to our buffer.
mov ecx, MSGLEN
o32 fs rep movsb ; Must use 32-bit addressing.
And now that we got it copied, let’s call into DOS to print the message and return control to DOS:
;; Print the message we fetched from extended mode.
mov ah, 40h
mov bx, 1
mov cx, MSGLEN
mov dx, msgcopy ; Remember this was all ... at first!
int 21h
;; And jump back to DOS.
mov ax, 4c00h
int 21h
If all goes well, you should see Hello, unreal mode! in the console and the usual C:\> prompt should greet you again.
But, wait, there is more! If you happen to be running this under Bochs—and I recommend that you do because it offers much better debugging facilities than DOSBox—you can pause the simulation with CTRL+C and dump the segment registers with sreg:
<bochs:2> sreg
es:0x010e, dh=0x00009300, dl=0x10e0ffff, valid=7
Data segment, base=0x000010e0, limit=0x0000ffff, Read/Write, Accessed
cs:0x000f, dh=0x00009300, dl=0x00f0ffff, valid=3
Data segment, base=0x000000f0, limit=0x0000ffff, Read/Write, Accessed
ss:0x010e, dh=0x00009300, dl=0x10e0ffff, valid=7
Data segment, base=0x000010e0, limit=0x0000ffff, Read/Write, Accessed
ds:0x010e, dh=0x00009300, dl=0x10e0ffff, valid=3
Data segment, base=0x000010e0, limit=0x0000ffff, Read/Write, Accessed
fs:0x0000, dh=0x00cf9300, dl=0x0000ffff, valid=11
Data segment, base=0x00000000, limit=0xffffffff, Read/Write, Accessed
gs:0x0000, dh=0x00009300, dl=0x0000ffff, valid=7
Data segment, base=0x00000000, limit=0x0000ffff, Read/Write, Accessed
ldtr:0x0000, dh=0x00008200, dl=0x0000ffff, valid=1
tr:0x0000, dh=0x00008b00, dl=0x0000ffff, valid=1
gdtr:base=0x0000000000011c72, limit=0x20
idtr:base=0x0000000000000000, limit=0x3ff
Pay attention to the details for the limit field of all the segment registers. You can see how the value is 0x0000ffff for all of them as you’d expect in real mode… but FS’s limit is the non-standard 0xffffffff. We did it. We are in unreal mode and DOS still runs fine. (In fact, remember that HIMEM.SYS itself does leverage unreal mode and this driver was active almost all the time in a DOS installation.)
IMPORTANT: You can download the full source code by clicking on unreal.asm.
Once you download the source code, you can build it with:
nasm -o unreal.com unreal.asm
And once built, you can run it within DOSBox by copying the binary into a directory you mount within the emulator or use mtools to copy it into a DOS boot disk image for Bochs.
DOS extenders
If you resisted the urge to keep toying with the example code presented above and are still reading, great! We can continue onto our final topic: DOS extenders. These programs are what truly set DOS free from the 1 MB address space limitations and thus are the right way to conclude this article.
A DOS extender, in rough terms, is a wrapper for your code that enters protected mode and transfers control back to you. This is very useful because, by running in protected mode, your code segment can span more than 640 KB, finally letting you run large binaries without resorting to ancient spells like overlays. But if that was the only thing that a DOS extender did, it would be too simple of a thing and not make it a DOS-anything.
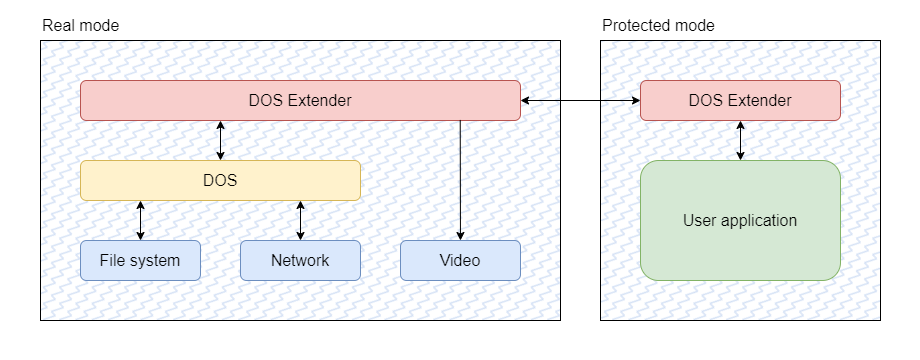
The crucial feature that DOS extenders provide is a mechanism to call back into the BIOS and DOS to access the services these provide. In particular, this means accessing drivers and the file system. They do so by exposing the same DOS API of the real mode host in protected mode, and they do this so that they can transparently service it in an efficient manner.
The general mechanics behind DOS extenders are very similar to what I described earlier: they enter protected mode to use extended memory and run your code, but they temporarily return to real mode to issue BIOS and DOS service calls. Unfortunately, this naive implementation would be quite inefficient, so DOS extenders actually service various APIs in protected mode to avoid returning to real mode, and they optimize large buffer transfers to minimize the number of switches when they do have to switch modes. In other words, DOS extenders are their own mini OS on top of DOS.
DOS extenders were widely used in games, and you may well remember the iconic message that DOOM printed on startup:
C:\>DOOM
DOS/4GW Protected Mode Run-time Version 1.97
Copyright (c) Rational Systems, Inc. 1990-1994
These messages came from DOS/4G, the most common DOS extender of all. The reason it was so common is because the “W version” was the free (but limited) edition of DOS/4G, and it shipped with the popular Watcom C compiler that produced protected mode binaries. But pay attention to “run-time” in that message. Why run-time?
DOS extenders were not the only system component that entered protected mode. By the time DOS extenders became popular, Windows was already a thing and Windows likes protected mode too. And as we saw in the previous post, DOS itself came with EMM386.EXE, another mini hypervisor that put DOS inside a VM86 instance so that it could easily reference extended memory. So what if you wanted to run a popular DOS-extended program, say DOOM, inside one of these also-popular protected mode environments?
Tough luck. Nesting protected modes was impossible until virtualization appeared. VM86 was close to what was necessary but it didn’t allow running protected mode programs from within it. So, how did this work? How could you run a DOS-extended program inside Windows or while EMM386.EXE was running?
Like in any computing problem, the answer is simple: by means of an abstraction layer! To support this flow, Microsoft defined the DOS Protected Mode Interface (DPMI), an API to abstract the core services to interact with protected mode. DPMI is not a replacement for a DOS extender though: DPMI is an API that DOS extenders themselves use to deal with protected mode operations.
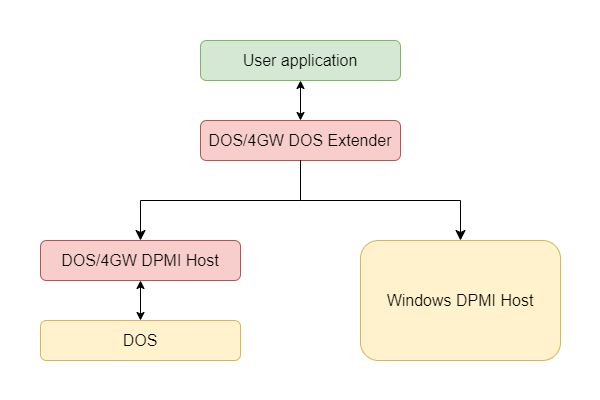
In the case of DOS-extended programs, the first thing that they do at startup is check if a DPMI kernel is present. If one exists, such as when the DOS program runs within Windows, then the DOS extender leverages Windows’ DPMI services and delegates all operations to Windows. But if such a provider isn’t running, the DOS extender starts the DPMI kernel typically built into itself.
If you want to see even more code in action, I refer you to skim through the sources of the free DOS/32 extender and the free CWSDPMI host.
And with that, I’m hoping that the next article will finally be the one talking about DJGPP and everything else it had to do to make Unix applications run semi-seamlessly on DOS… unless some other preparatory essay becomes necessary!

{kind=link}
{kind=link}